Blending into a human-centered work environment
Realizing the modular mobile manipulation robot 'Physical AI'
Maximizing all industrial sites where humans and robots coexist

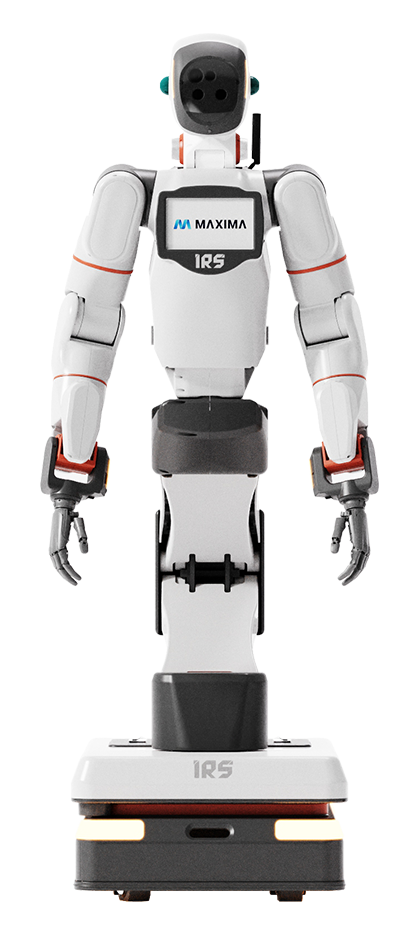


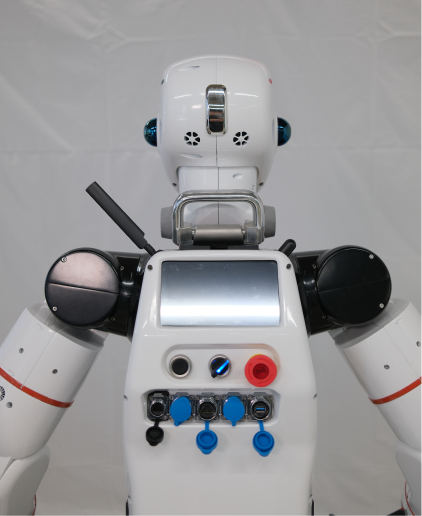
| Dimension (W X T X H) | 586mm X 980mm X 1,919mm | |
|---|---|---|
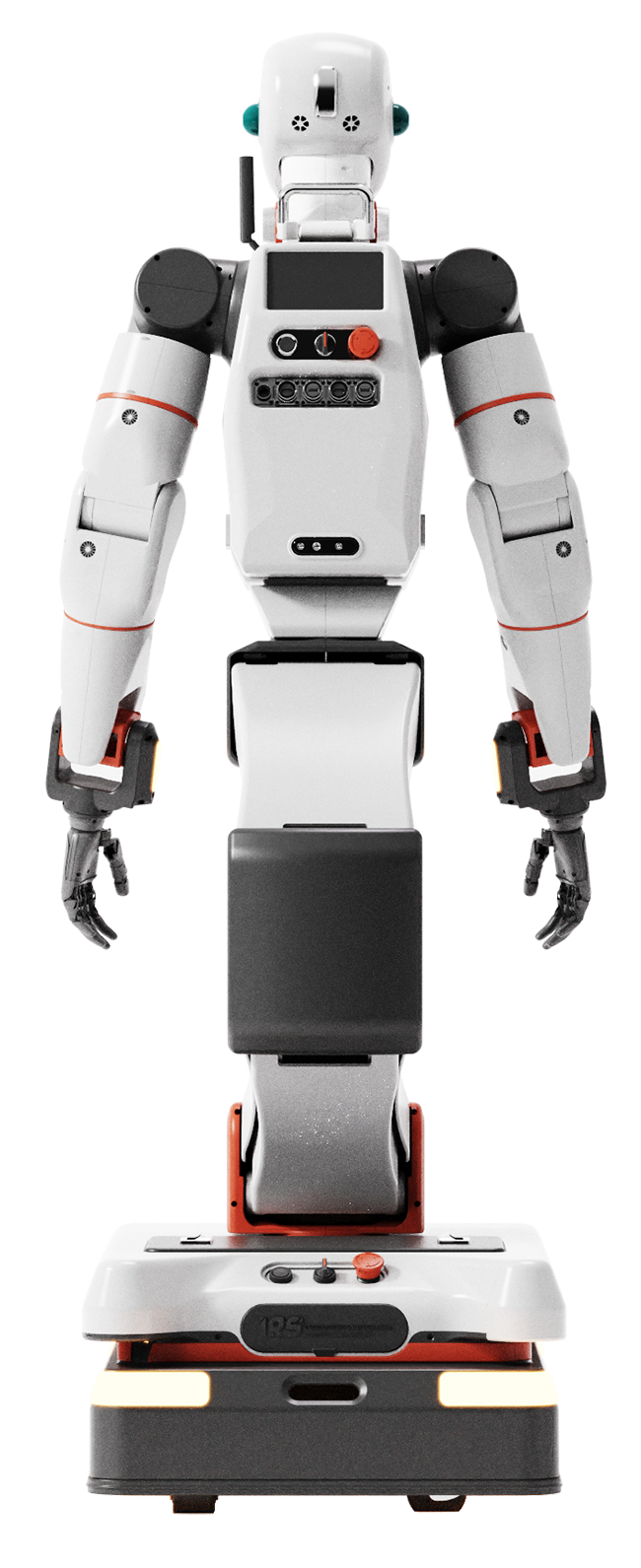
| Degree of freedom | Total | 21 |
| Head | 2 | |
| Torso | 3 | |
| Arm | 7 | |
| Under body | 3 | |
| Hand | 6 | |
| Arm | Single Arm Payload | 10kg |
| Repeatability | ±0.5mm | |
| Power | Charging time | 2h |
| Operation duration | 5h | |
| Source | 70Ah | |
| Mobile | Drive type | Differential Drive |
| Maximum Speed | 1.2 m/s (Peak 2m/s) | |
| Onboard computer (ApplicationPC) |
Nvidia Thor / Nvidia Jetson OrinNano | |
| Safety Functions | Self-collision avoidance, Task space limit, Fall prevention, Torque limit, Position error, Collision detection | |
| AI integration | Teleoperation, Data collection, Learning with dexterous hand and gripper, Etc… | |
-
AI-driven Intelligent System
Autonomous intelligence powered
by vision and reinforcement learning. -
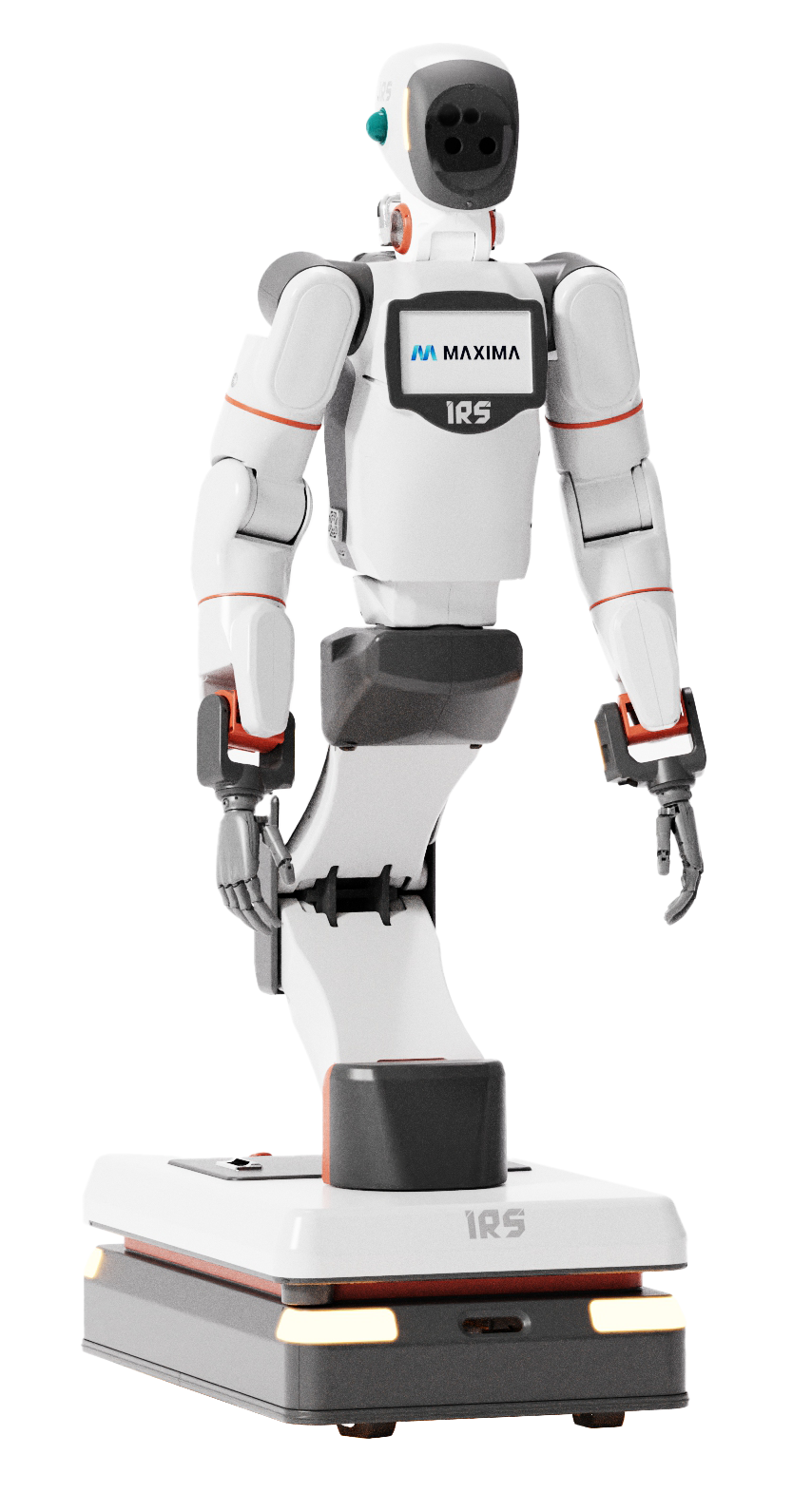
Modular Structure
Modular architecture freely
combining autonomous base,
manipulators, and sensors. -
eXandable scalability
Beyond logistics and manufacturing,
to defense, construction, aerospace, etc
A platform ecosystem that can be expanded to various industries -
Architecture Integrated Structure
Structure, hardware, and AI control systems
organically integrated to provide consistent top performance -
Manipulation Skilled Work
Core capability of mobile manipulation that handles objects precisely and powerfully like a human hand
-
Interactive Interaction
A partner that safely collaborates and enhances capabilities
in the same space as human workers
Modular Mobile Manipulation
Customized configuration according to field requirements
Combination of mobile, manipulator, work tools, sensors, etc.
Humanoid for Physical AI
Brownfield that can move without changing existing facilities
Complete automation in the factory
Unified AI Core & FMS
Multiple heterogeneous robots (MMR, humanoid, etc.)
Real-time optimization of integrated control workflows